 推荐产品
推荐产品
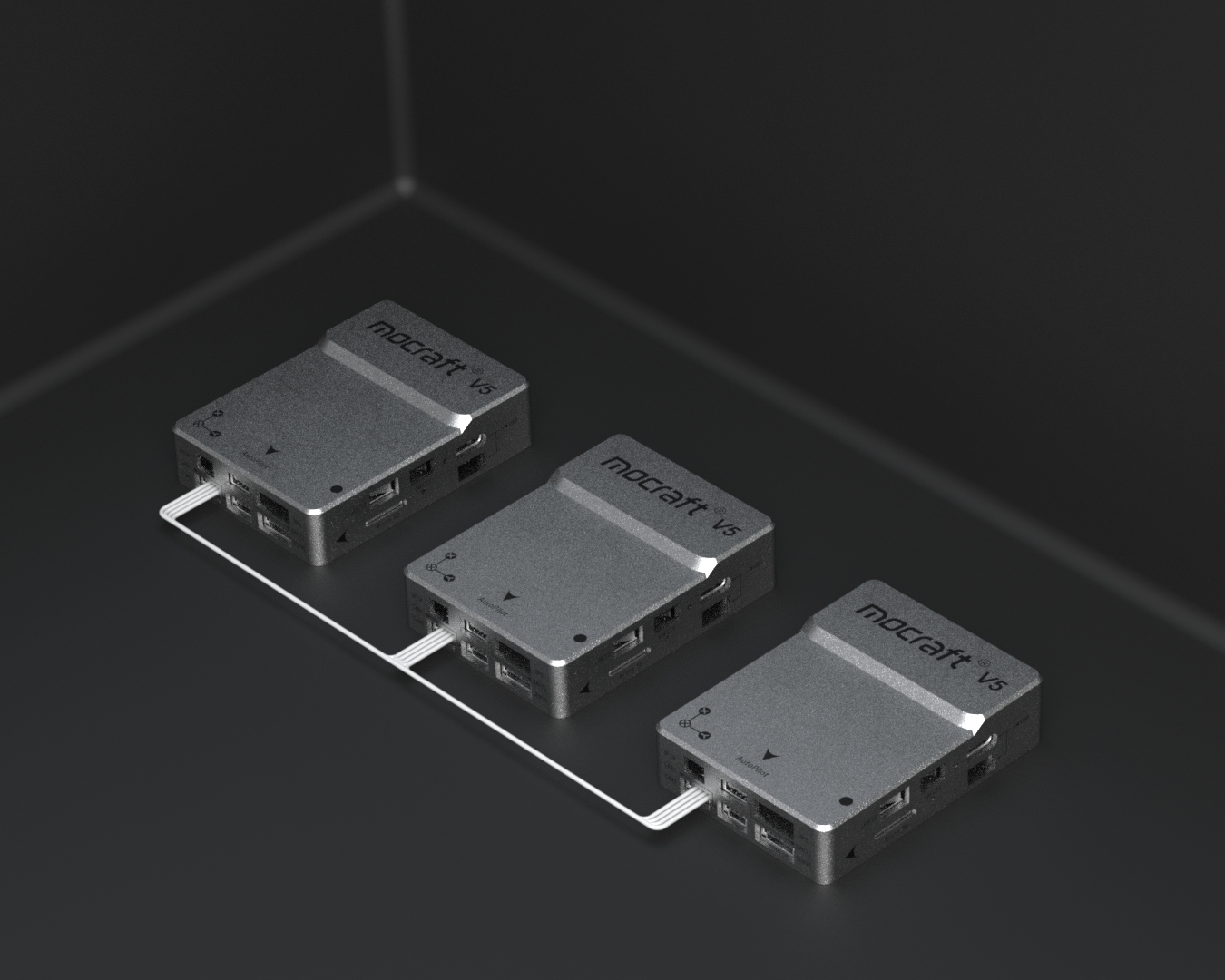
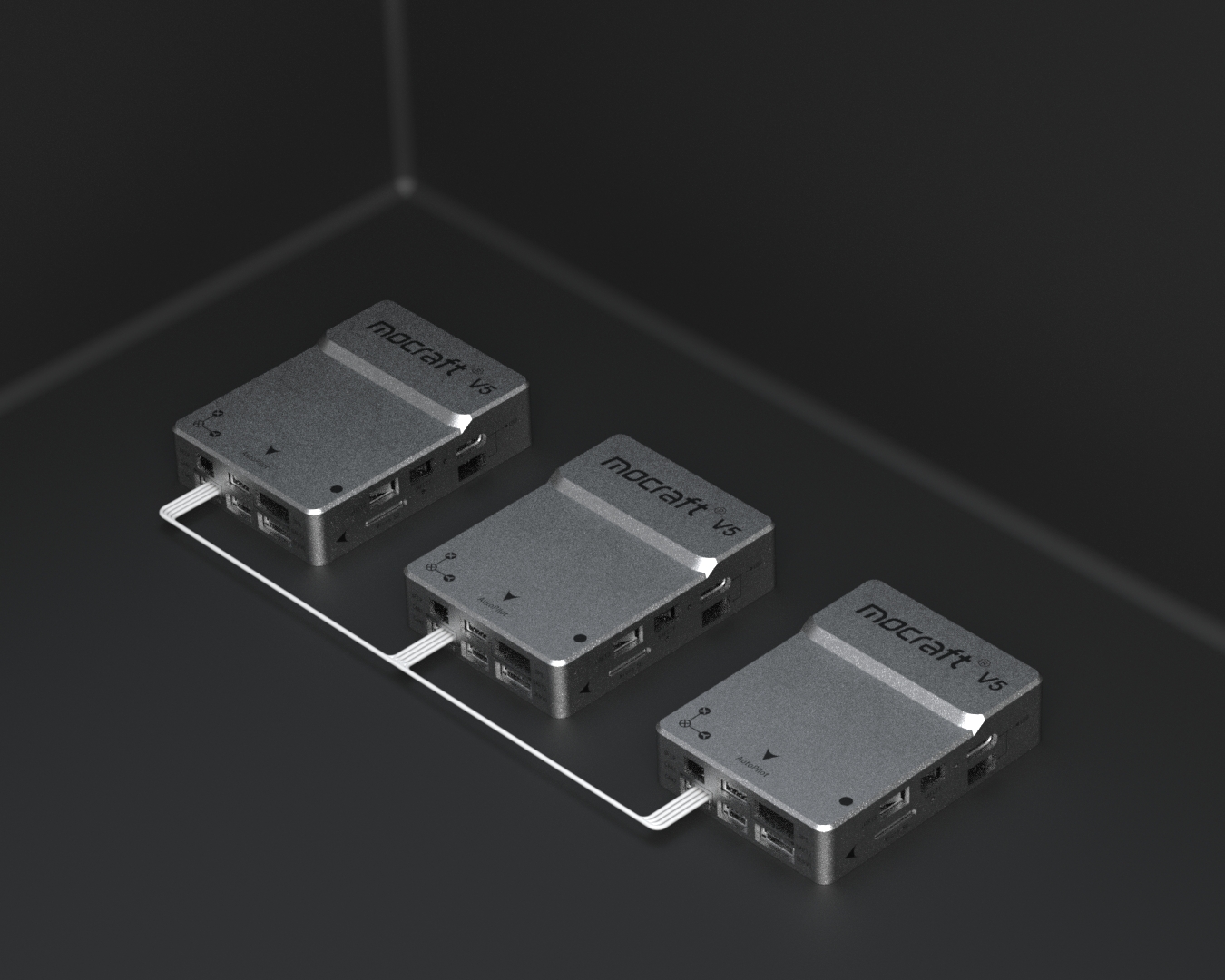
多控并联
让多块飞控同时在线工作。系统实时评分、自动选举 Leader、故障即时降级——飞控级冗余,守护每一次飞行。
系统架构
2–6 块飞控同时运行完整 ArduPilot 控制链路,通过独立 CAN 总线交换状态。系统实时判断哪块飞控最健康、数据最可信,让它成为当前控制 Leader。所有飞控平权,不依赖固定主从。
每个飞控持续广播:健康状态、传感器数据、姿态一致性、评分、Leader 状态和控制积分项。CAN-ESC Adapter 在输出侧完成仲裁,确保电机侧只接受一个可信控制源。
故障检测、隔离与恢复
ParallelFC 的核心是 FDIR(Fault Detection, Isolation and Recovery)。系统通过明确的状态机实现自动降级,从全冗余到单飞控再到故障安全,每一步都有确定性规则。
多控在线
异常降级
仅剩单控
安全着陆
健康评分维度
IMU 健康度
振动水平、噪声幅值、温度漂移等传感器状态实时监测
传感器综合健康
GPS、气压计、EKF 状态融合等多源数据质量评估
飞控间一致性
角速度、加速度、姿态、位置是否与其他飞控一致
数据新鲜度
心跳帧和状态帧是否按时更新,掉线即降权
Leader 选举不是简单选「当前分最高」的飞控,而是使用带迟滞和确认轮次的机制。现任 Leader 有一定优势,新候选必须持续表现更好才会切换,避免瞬时噪声导致控制权抖动。
五大核心能力
飞控级冗余
不是只冗余传感器,而是完整飞控链路并联。每块飞控独立运行完整控制算法,支持 2–6 块同时在线。
平权 Leader 选举
任一飞控都可以接管,不依赖固定主控。带迟滞和确认轮次的选举机制,保证切换稳定可靠。
I-term 积分同步
Leader 向 Follower 实时同步 PID 积分项。切换瞬间新 Leader 已拥有接近原 Leader 的积分状态,控制输出不跳变,姿态无冲击。
CAN-ESC 输出仲裁
在飞控和电调之间增加冗余仲裁层。即使飞控端短暂出现多个候选 Leader,电机侧也只接受一个可信控制源。
FDIR 自动降级
从 NORMAL → DEGRADED → SINGLE → FAILSAFE,明确状态机驱动,飞控异常即隔离,不拖累整体。
产品支持
ParallelFC 多控并联架构支持 M1 系列飞控,V5+ 后续待定
| 能力 | V3 | V5 | V5+ | M1 | M1 Pro |
|---|---|---|---|---|---|
| ParallelFC 多控并联 | × | × | 待定 | ✔ | ✔ |
| CAN-ESC Adapter | × | × | 待定 | ✔ | ✔ |
| I-term 积分同步 | × | × | 待定 | ✔ | ✔ |
| FDIR 故障状态机 | × | × | 待定 | ✔ | ✔ |
SmartTune × ParallelFC
两套核心技术,解决飞行控制的两个不同层面
SmartTune
提升控制效果
让飞机飞得更稳
更贴合当前硬件状态
ParallelFC
提升系统可靠性
单点故障下仍然受控
飞控级冗余容错
一条让飞控更会学习自己的飞机,另一条让飞控系统本身具备冗余和容错能力。
SmartTune 关注控制性能自适应,ParallelFC 关注系统级安全冗余,
两者共同面向更复杂、更高价值的低空飞行任务。
从控制性能到系统安全
构建下一代工业无人机飞控底座
「面向高可靠无人机、工业低空平台和重载飞行器的飞控冗余底座。」